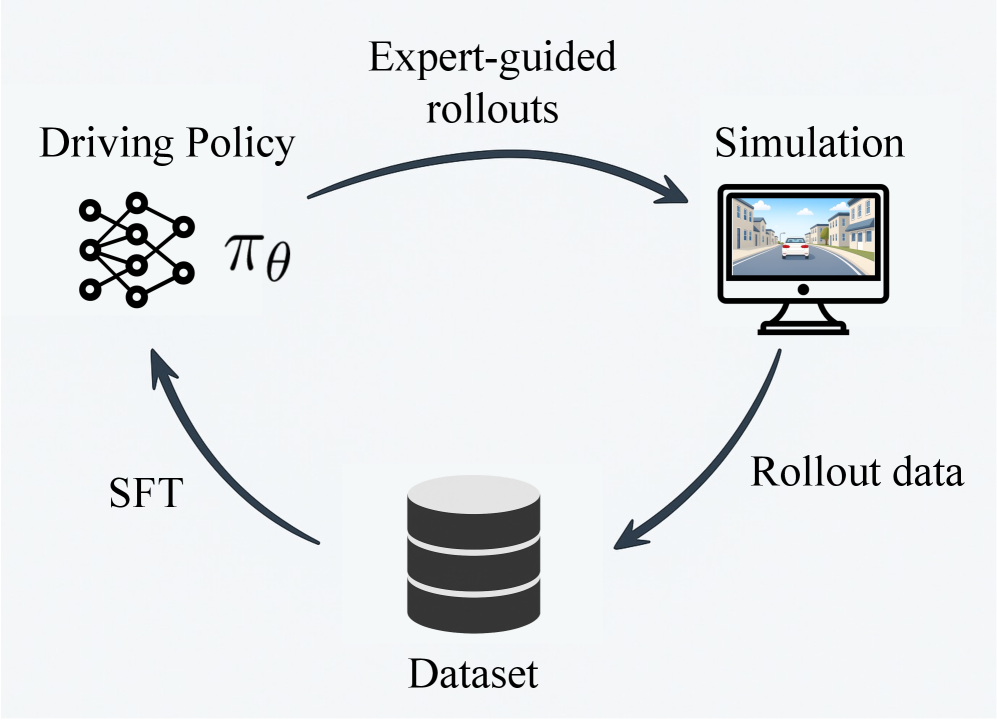
Autonomous driving policies are typically trained via open-loop behavior cloning of human demonstrations. However, such policies suffer from covariate shift when deployed in closed loop, leading to compounding errors. We introduce Rollouts as Demonstrations (RoaD), a simple and efficient method to mitigate covariate shift by leveraging the policy’s own closed-loop rollouts as additional training data. During rollout generation, RoaD incorporates expert guidance to bias trajectories toward...