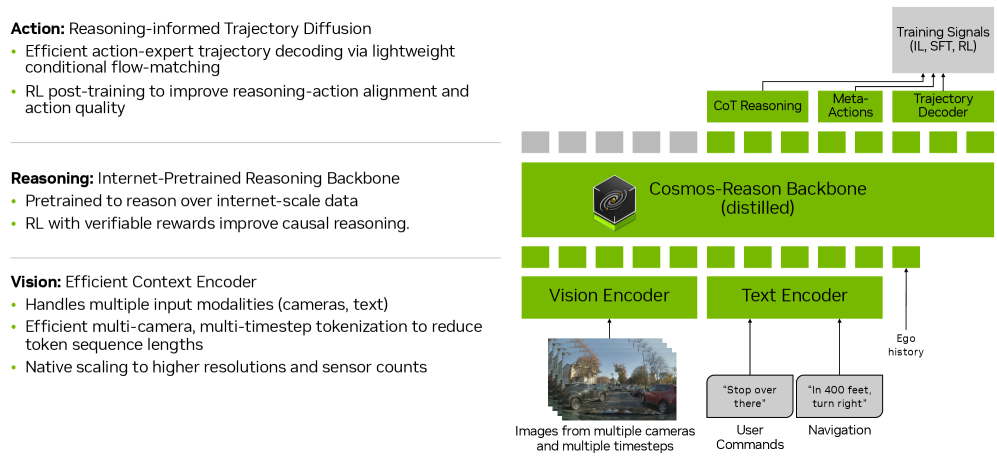
End-to-end architectures trained via imitation learning have advanced autonomous driving by scaling model size and data, yet performance remains brittle in safety-critical long-tail scenarios where supervision is sparse and causal understanding is limited. To address this, we introduce Alpamayo-R1 (AR1), a vision-language-action model (VLA) that integrates Chain of Causation reasoning with trajectory planning to enhance decision-making in complex driving scenarios. Our approach features three...