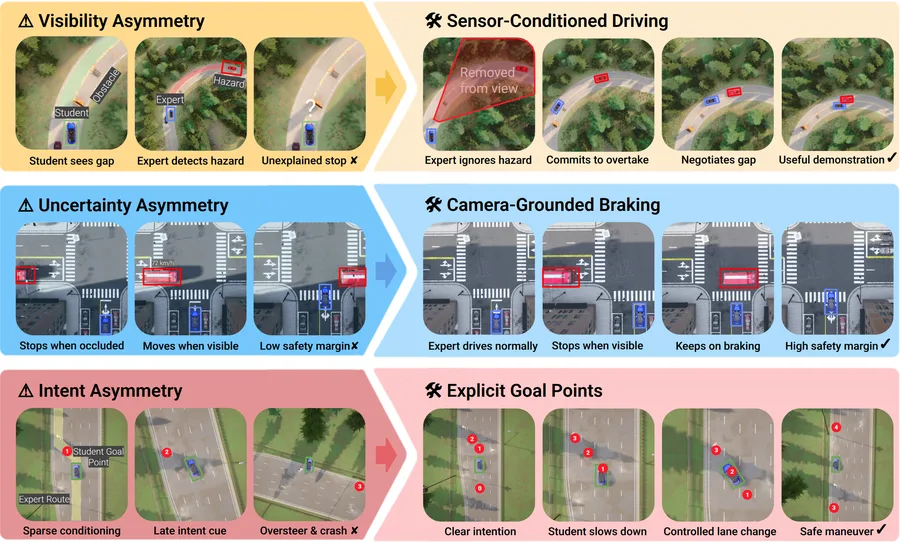
Simulators can generate virtually unlimited driving data, yet imitation learning policies in simulation still struggle to achieve robust closed-loop performance. Motivated by this gap, we empirically study how misalignment between privileged expert demonstrations and sensor-based student observations can limit the effectiveness of imitation learning. More precisely, experts have significantly higher visibility (e.g., ignoring occlusions) and far lower uncertainty (e.g., knowing other vehicles'..