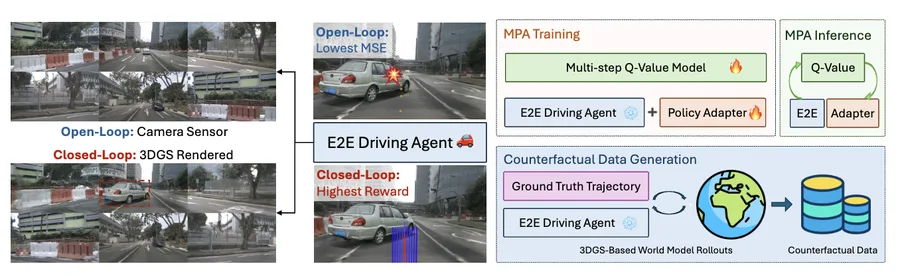
End-to-end (E2E) autonomous driving models have demonstrated strong performance in open-loop evaluations but often suffer from cascading errors and poor generalization in closed-loop settings. To address this gap, we propose Model-based Policy Adaptation (MPA), a general framework that enhances the robustness and safety of pretrained E2E driving agents during deployment. MPA first generates diverse counterfactual trajectories using a geometry-consistent simulation engine, exposing the agent to..