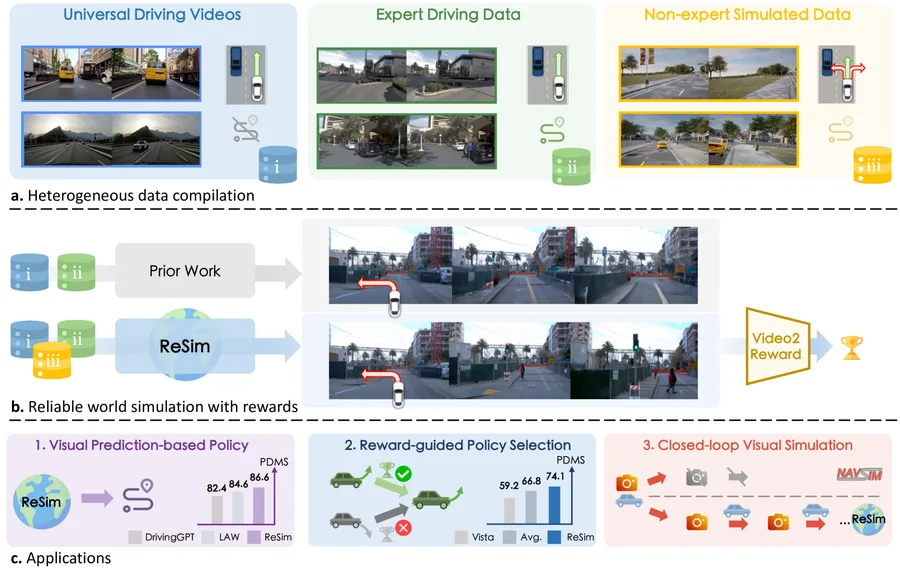
How can we reliably simulate future driving scenarios under a wide range of ego driving behaviors? Recent driving world models, developed exclusively on real-world driving data composed mainly of safe expert trajectories, struggle to follow hazardous or non-expert behaviors, which are rare in such data. This limitation restricts their applicability to tasks such as policy evaluation. In this work, we address this challenge by enriching real-world human demonstrations with diverse non-expert...