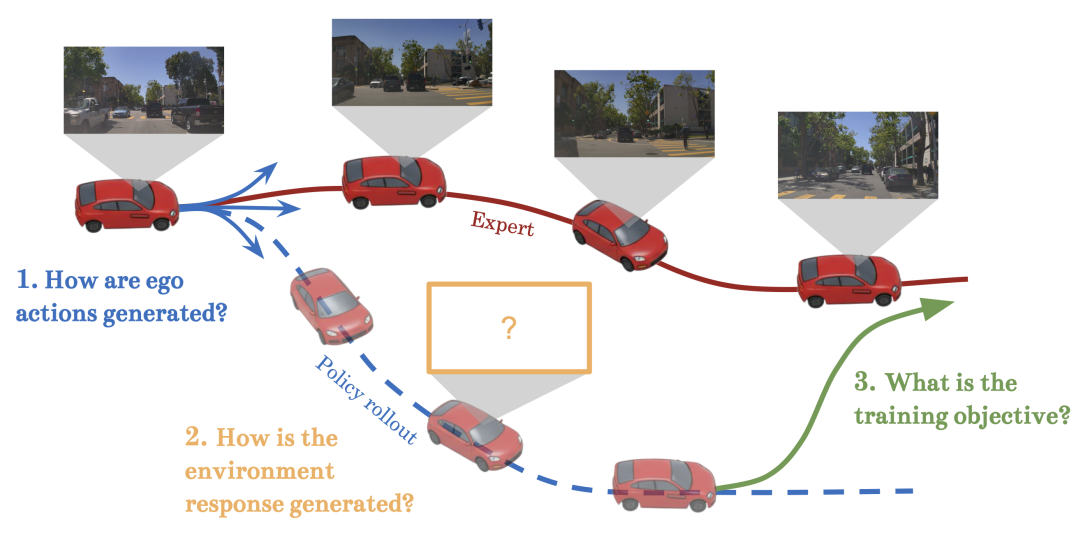
Behavior cloning, the dominant approach for training autonomous vehicle (AV) policies, suffers from a fundamental gap: policies trained open-loop on temporally independent samples must operate in closed-loop where actions influence future observations. This mismatch can cause covariate shift, compounding errors, and poor interactive behavior, among other issues. Closed-loop training mitigates the problem by exposing policies to the consequences of their actions during training. However, the...