
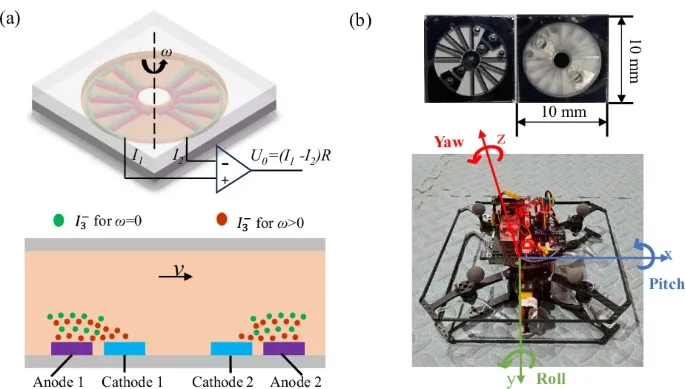
UAV attitude control requires high-fidelity angular acceleration. Gyroscope differentiation introduces phase lags and noise. We propose a compact MEMS electrochemical accelerometer with 3D plate electrodes. It is implemented in a closed-loop INDI control loop for UAV flight stabilization.
MEMS Electrochemical Angular Accelerometers: A Paradigm Shift for UAV Attitude Control
Maoqi Zhu