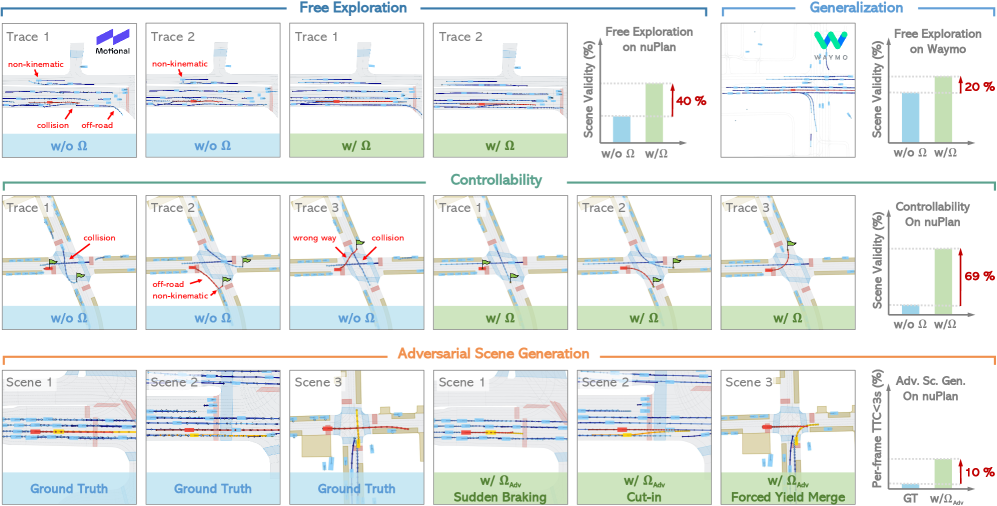
Realistic and diverse multi-agent driving scenes are crucial for evaluating autonomous vehicles, but safety-critical events which are essential for this task are rare and underrepresented in driving datasets. Data-driven scene generation offers a low-cost alternative by synthesizing complex traffic behaviors from existing driving logs. However, existing models often lack controllability or yield samples that violate physical or social constraints, limiting their usability. We present OMEGA, an..