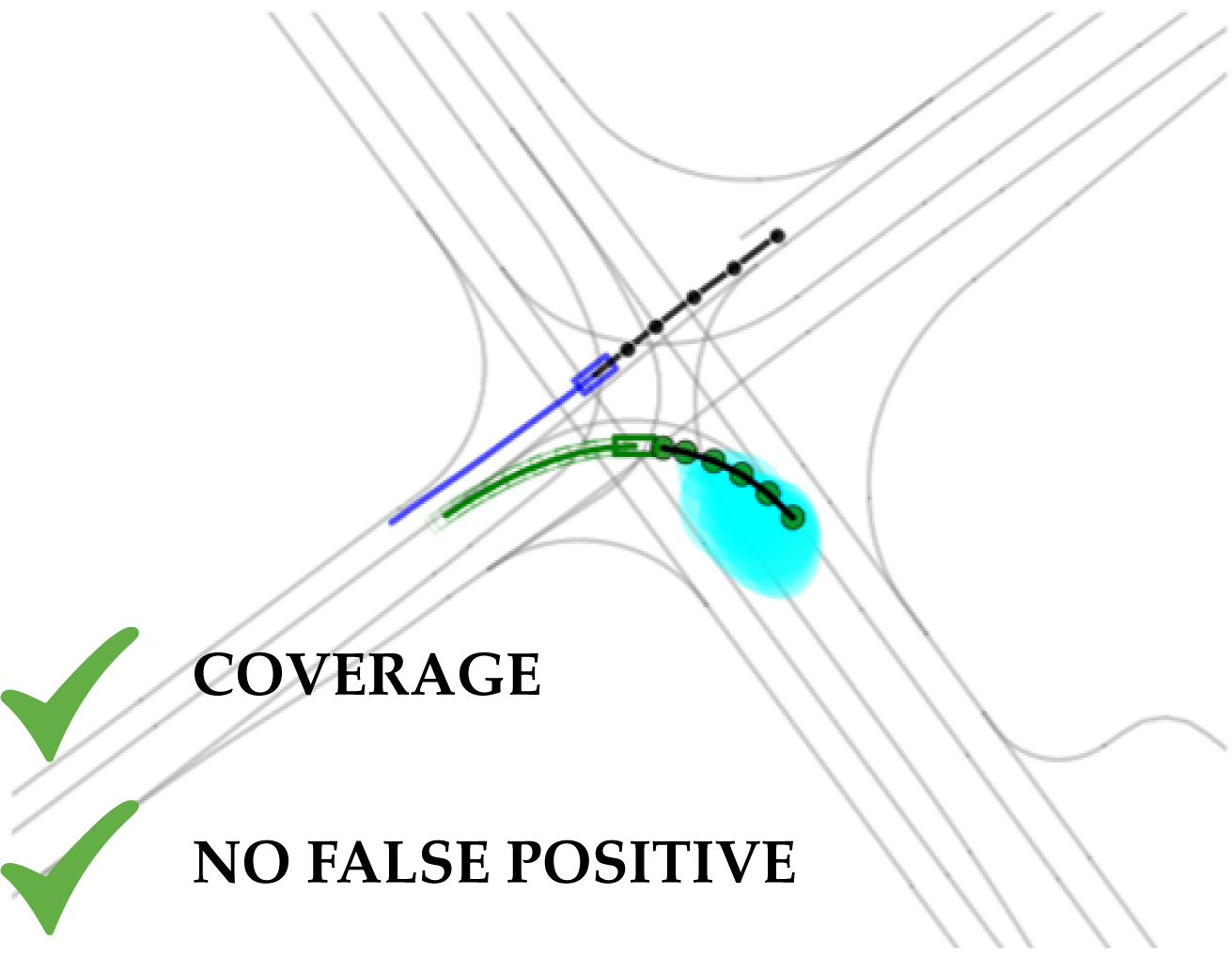
The advent of end-to-end autonomy stacks - often lacking interpretable intermediate modules - has placed an increased burden on ensuring that the final output, i.e., the motion plan, is safe in order to validate the safety of the entire stack. This requires a safety monitor that is both complete (able to detect all unsafe plans) and sound (does not flag safe plans). In this work, we propose a principled safety monitor that leverages modern multi-modal trajectory predictors to approximate...