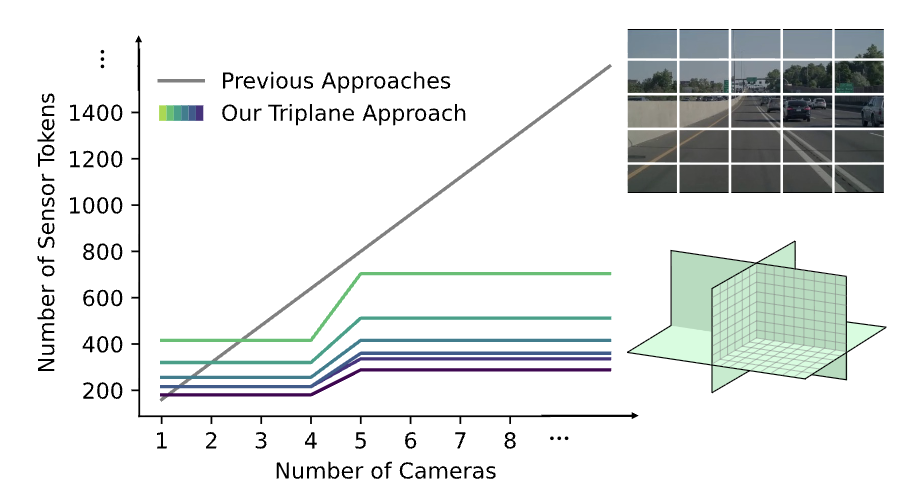
Autoregressive Transformers are increasingly being deployed as end-to-end robot and autonomous vehicle (AV) policy architectures, owing to their scalability and potential to leverage internet-scale pretraining for generalization. Accordingly, tokenizing sensor data efficiently is paramount to ensuring the real-time feasibility of such architectures on embedded hardware. To this end, we present an efficient triplane-based multi-camera tokenization strategy that leverages recent advances in 3D...